Singapore
info@zacobria.com | Sitemap | AP map | Disclaimer
Programming the Universal-Robot UR 5 and UR10 industrial robot hints and tips.

Hints and tips manual version 1.4 for Universal-Robots in PDF format
Zacobria Hints and tips manual Version 1.5, 1.6,1.7 or 1.8 is provided with the purchase of a Universal-Robot from Zacobria Pte. Ltd.
Index of the version 1.7 Universal Robots Zacobria Hints and Tips manual.
Screenshots from the version 1.6 and 1.7 Universal Robots Zacobria Hints and Tips manual.
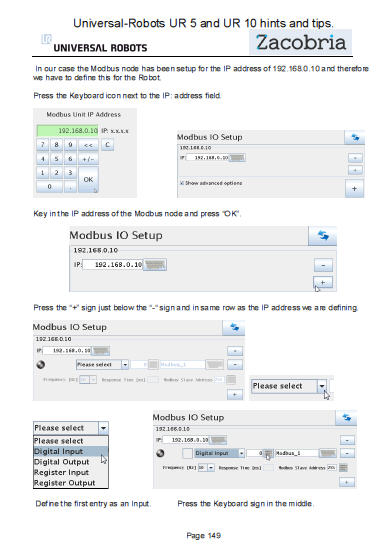
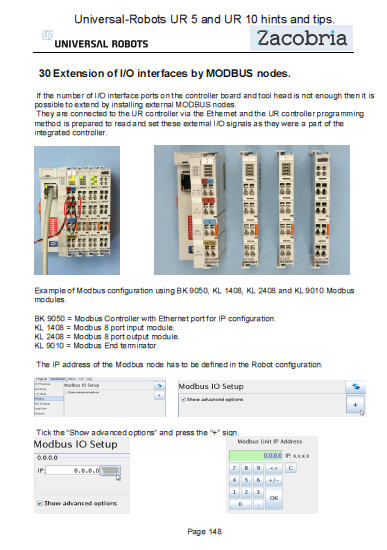
Modbus setup
Force Function
X, Y, Z, Rx, Ry, Rz position
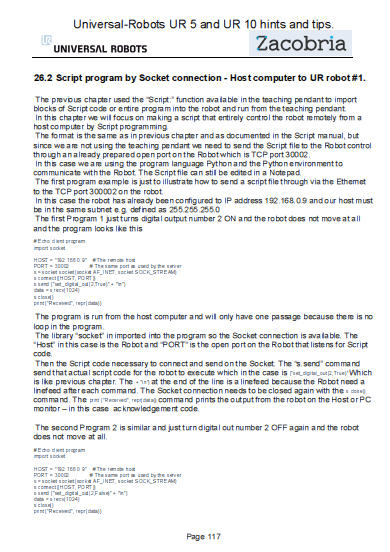
Script Programming
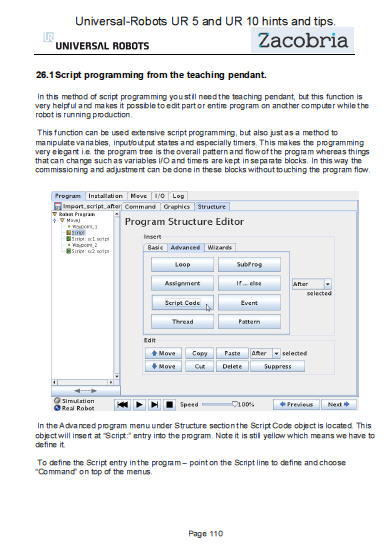
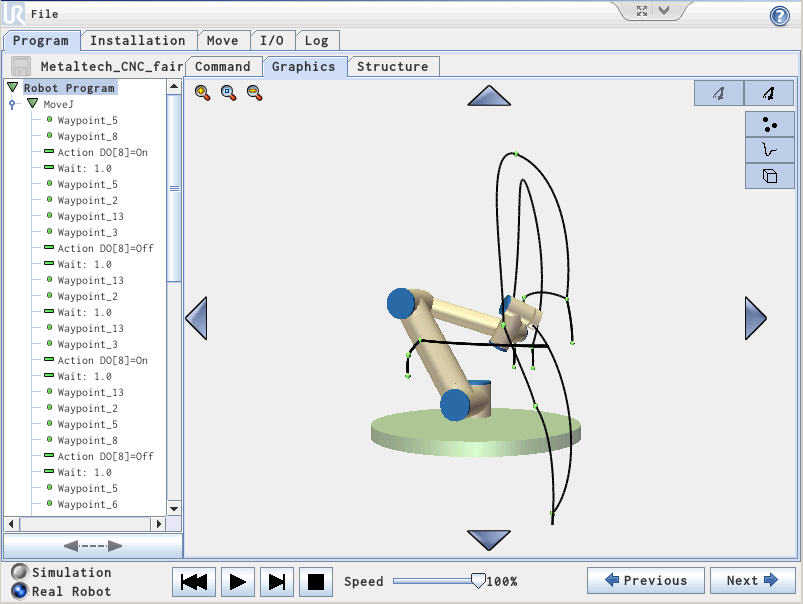
GUI Programming
GUI Programming
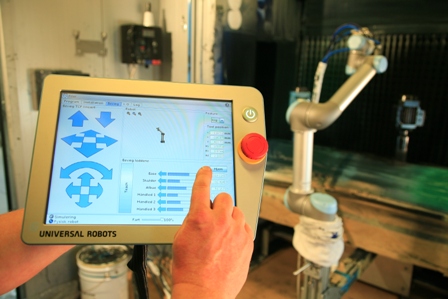
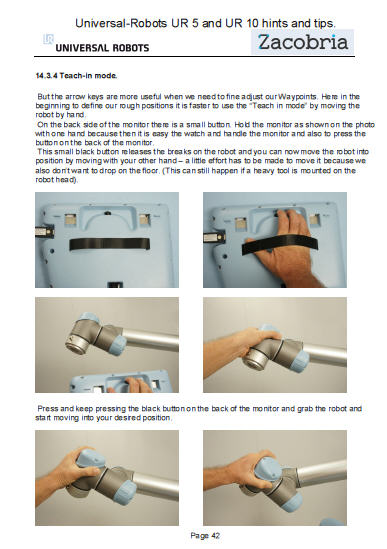
Teach mode GUI programming
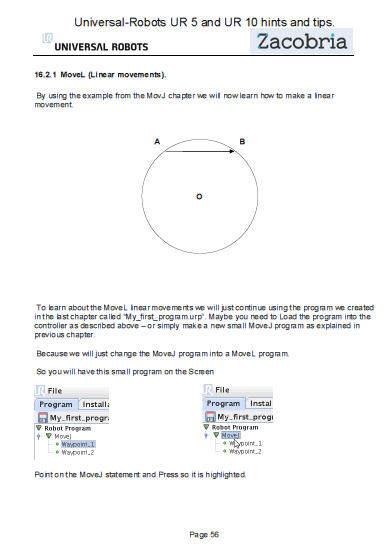
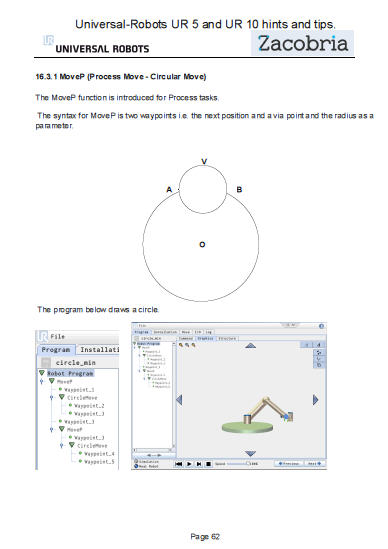
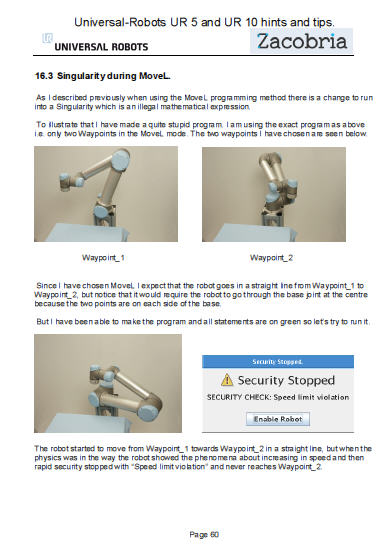
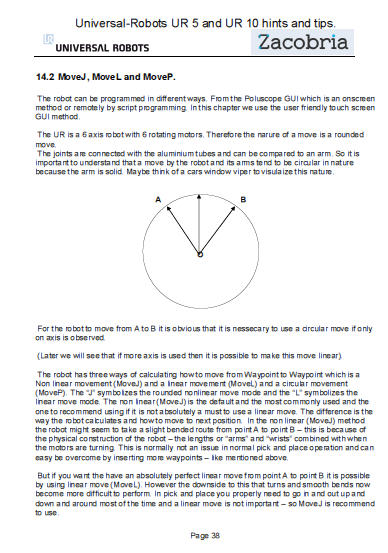
MoveJ, MoveL, MoveP
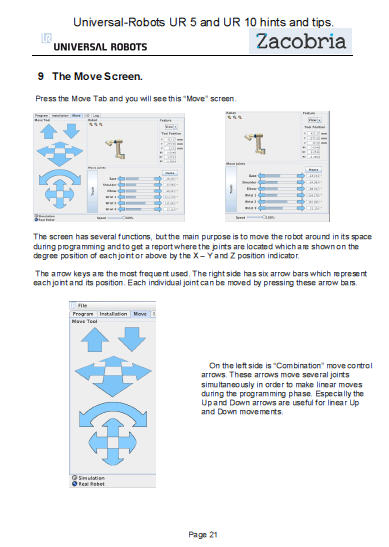
Move Screen and Menus
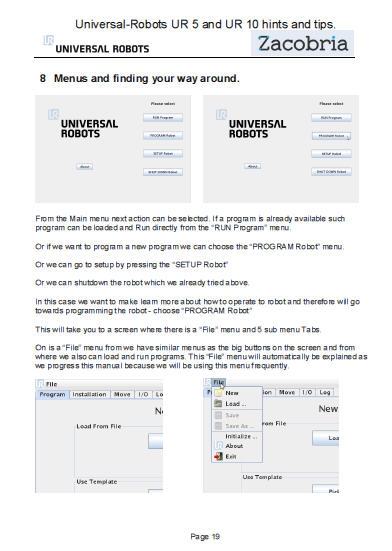
Universal-Robots Menu
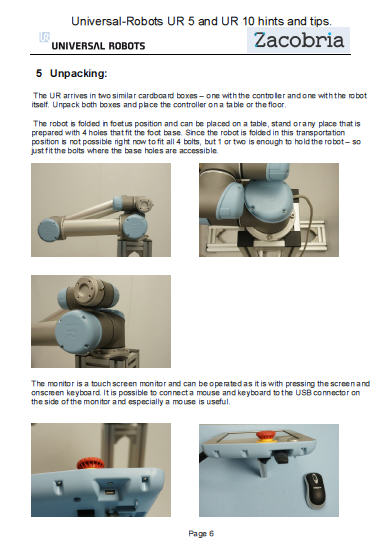
Universal_Robots Unpacking