Safety plane trigger.
This article will explain some details about the trigger of safety plane.
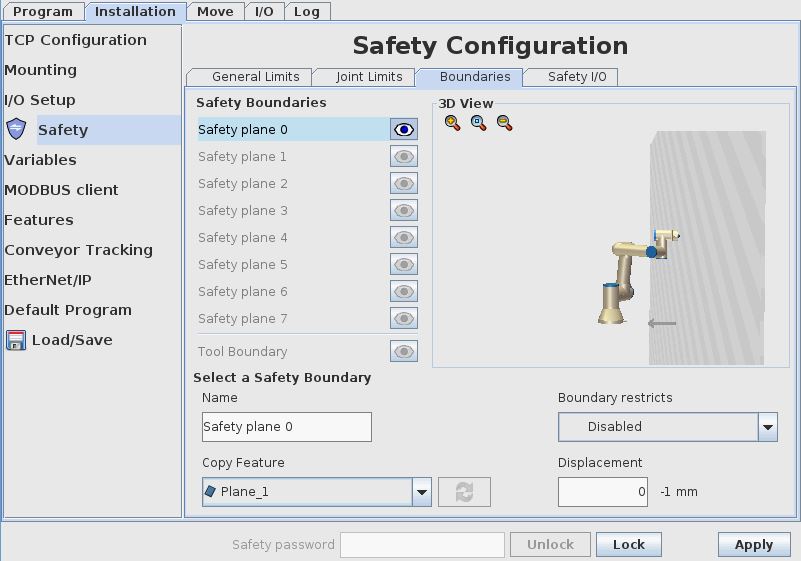
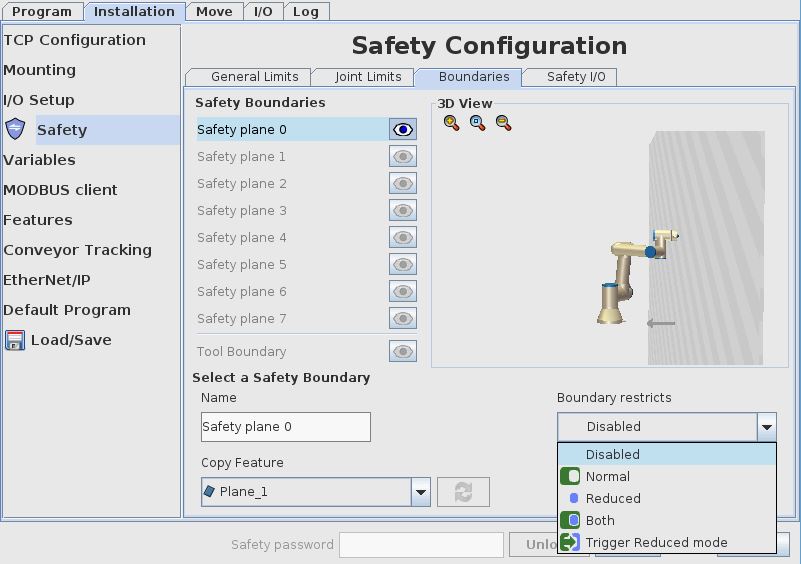
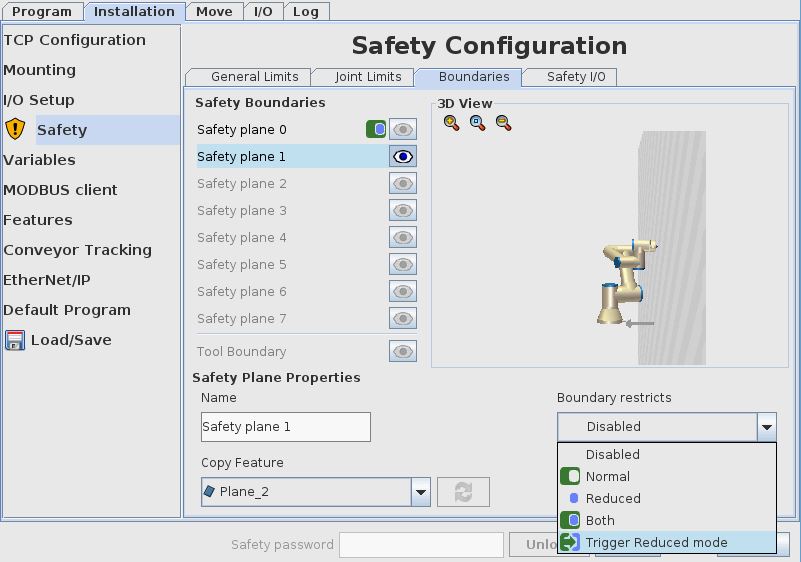
I the Safety menu when setting safety plane the menu for how to trigger the safety plane has 5 options.
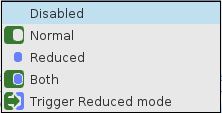
Disabled:
The safety plane is disabled and will not be triggered.
Normal:
The safety plane will be triggered when the robot running with normal speed meet the plane – And it will create a hard stop.
(Notice “Normal” means that the plane is triggered when the robot run with normal speed. So if the robot was already running reduced speed then this plane will not be triggered as a safety plane.
Reduced:
The safety plane will be triggered when the robot running with reduced speed meet the plane – And it will create a hard stop.
(Notice “Reduced” means that the plane is triggered when the robot run with reduced speed. So if the robot was running normal speed then this plane will not be triggered as a safety plane.
Both:
The safety plane will be triggered when the robot running with normal or reduced speed meet the plane – And it will create a hard stop.
(Notice “Normal” means that the plane is triggered when the robot run with normal or reduced speed. So if the robot was running normal speed or reduced speed then this plane will not be triggered as a safety plane.
Trigger reduced mode:
The safety plane will be triggered when the robot meet the plane and this will trigger the robot to enter Reduced mode. Notice that the “Reduced mode” can be set with different values for example a reduced speed.
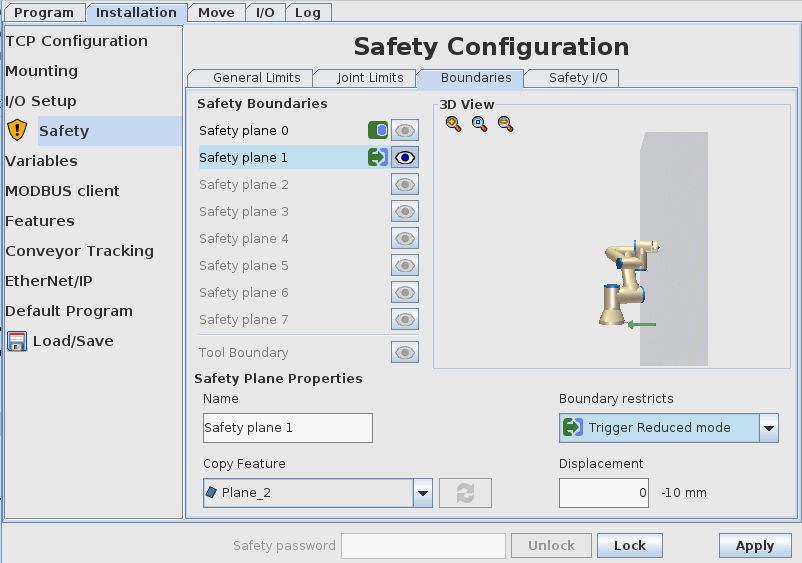
Below is an example of setting 2 different planes which are configured so the plane furthest away is a hard stop when the robot reach there – and the plane nearest to the robot is triggering a reduced mode with reduced speed.
So in the space before the plane near to the robot the robot can run with normal speed – and in the space between the planes the robot run with reduced speed – and when the robot reach the plane furthest away from the robot the robot will stop with a safety stop messages.
Example of setting Safety plane:
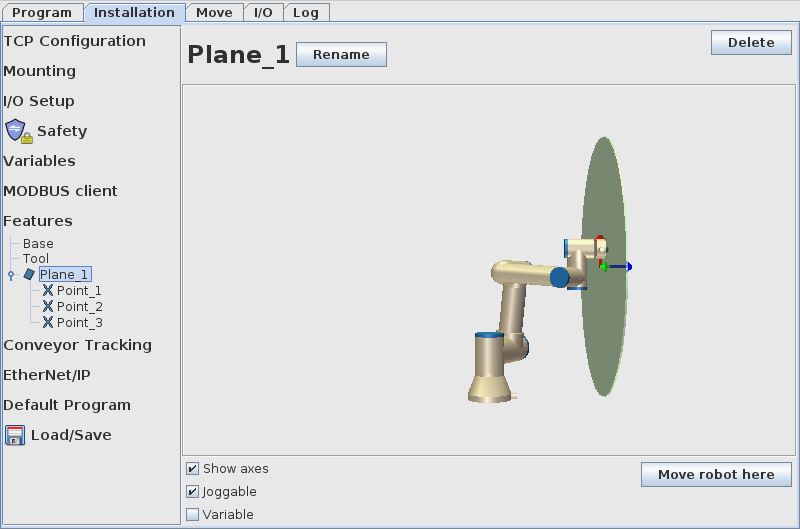
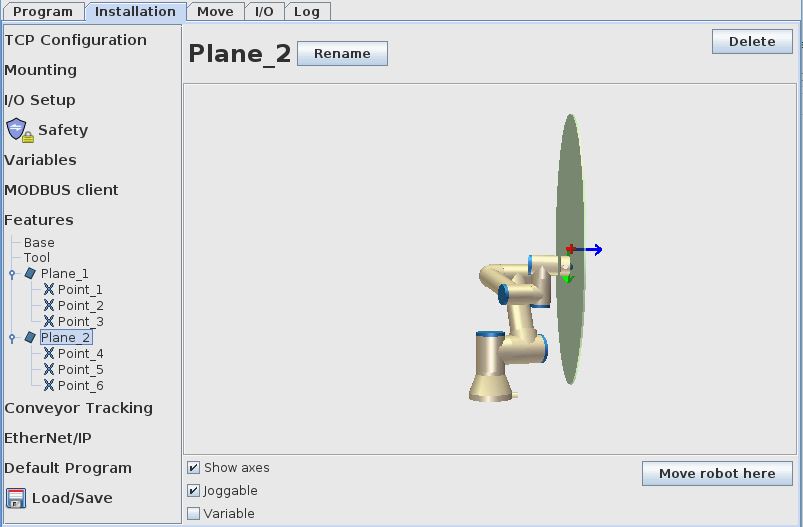
In this example the safety plane furthest away from the robot is set first.
The Features menu under Installation Tab the plane position is defined by setting 3 points in the plane.
To enter the Safety settings menu a password must be provided. When the correct password has been entered the robot will remove power to the robot.

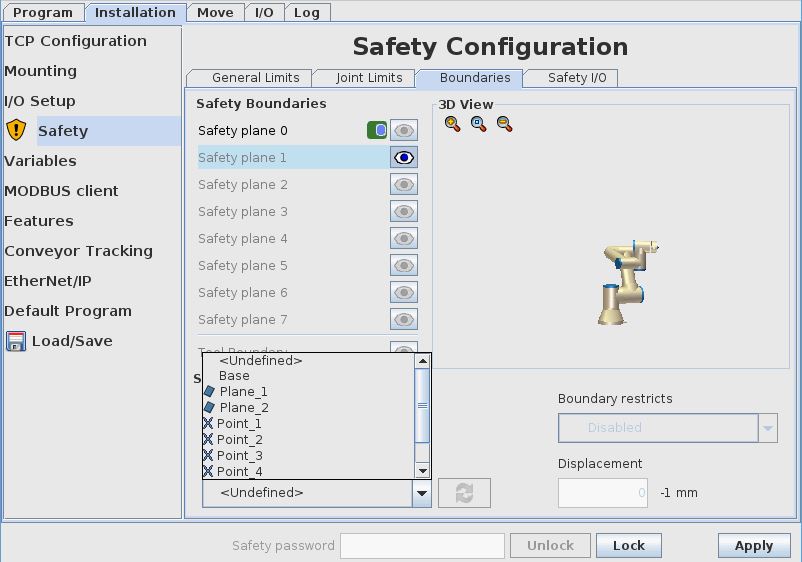
In the Safety menu and Boundaries the “safety plane 0” is defined as a safety plane by selecting the Plane_1.
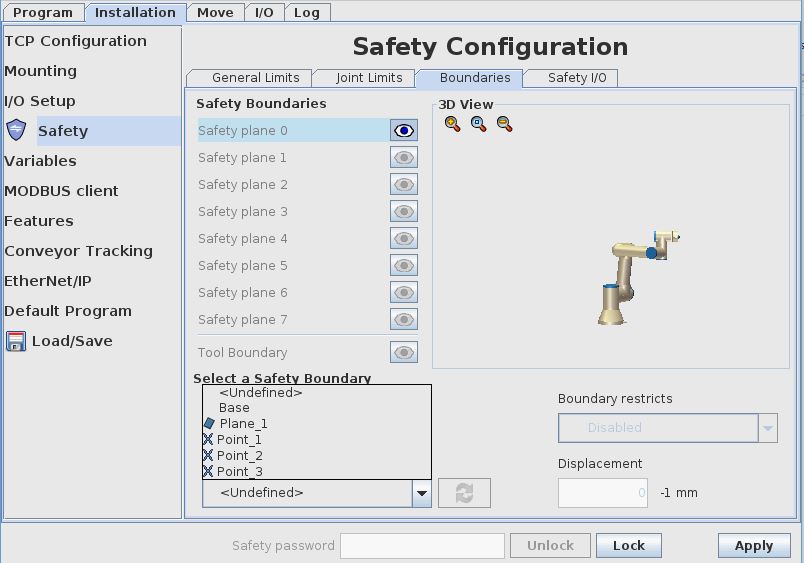
In the “Boundary restrict” menu the mode of trigger is defined (see above for description of each mode). For this plane furthest away from the robot “Both” is selected in this example which means the safety plane will be triggered whether the robot run with normal speed or the robot run with reduced speed.
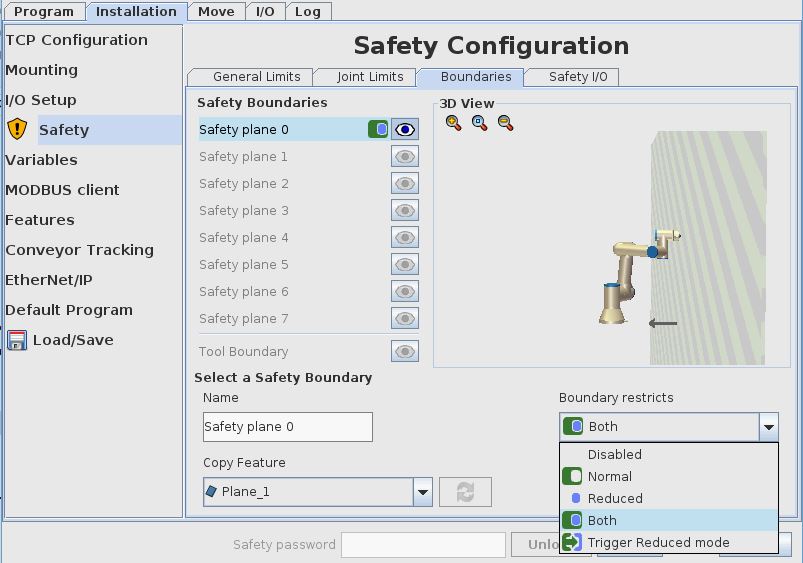
“Both” is selected.
The go out of the safety menu the robot
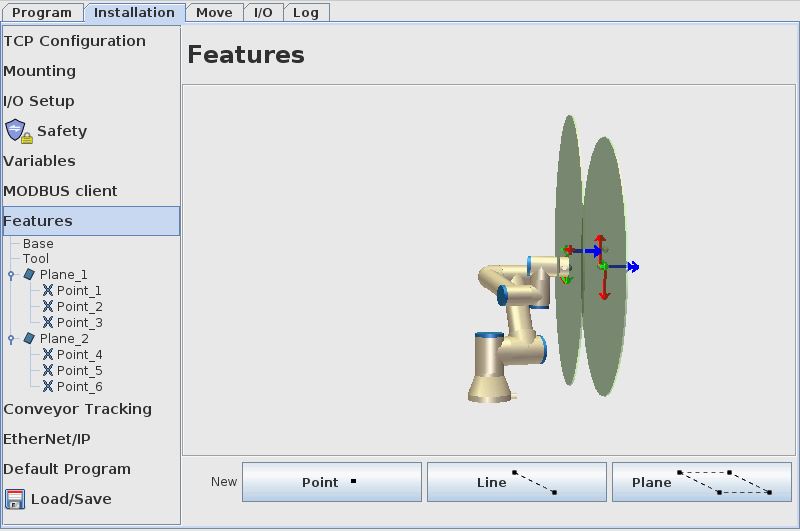
In “Features” under “Installation tab” the next pale is set. In this example this plane is set nearer to the robot.
The two planes defined.
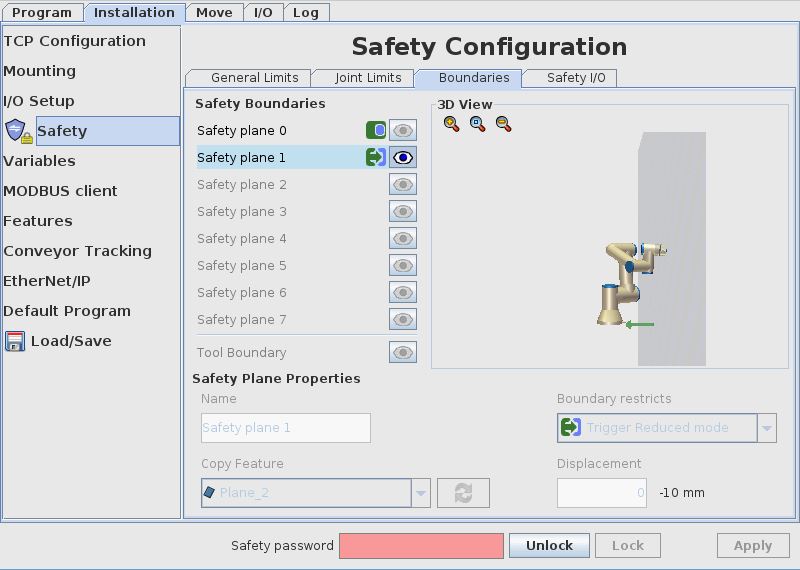
In the Safety menu and Boundaries the “safety plane 1” is defined as a safety plane by selecting the Plane_2.
In this example for safety plane nearest to the robot the mode “Trigger Reduced mode” is selected.

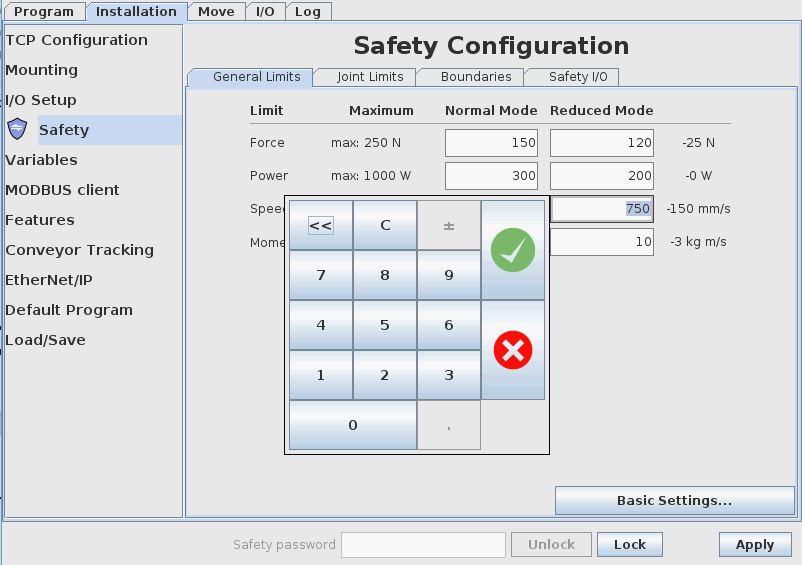
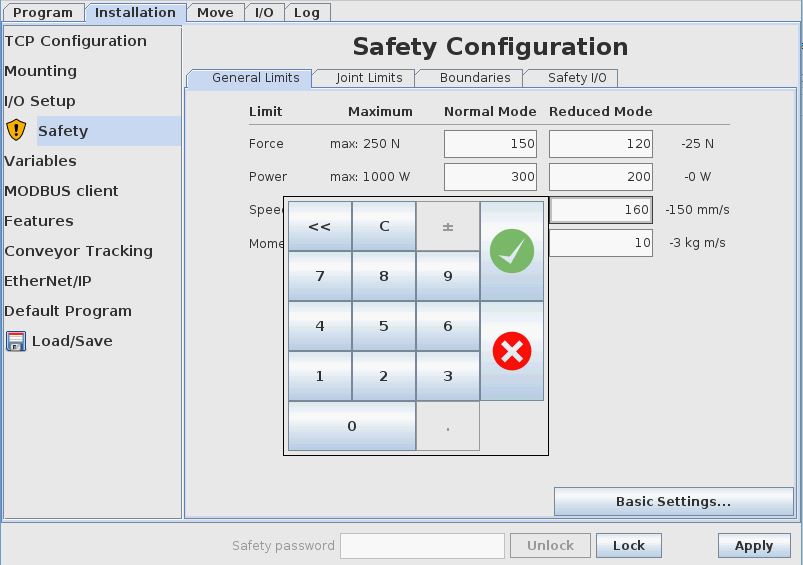
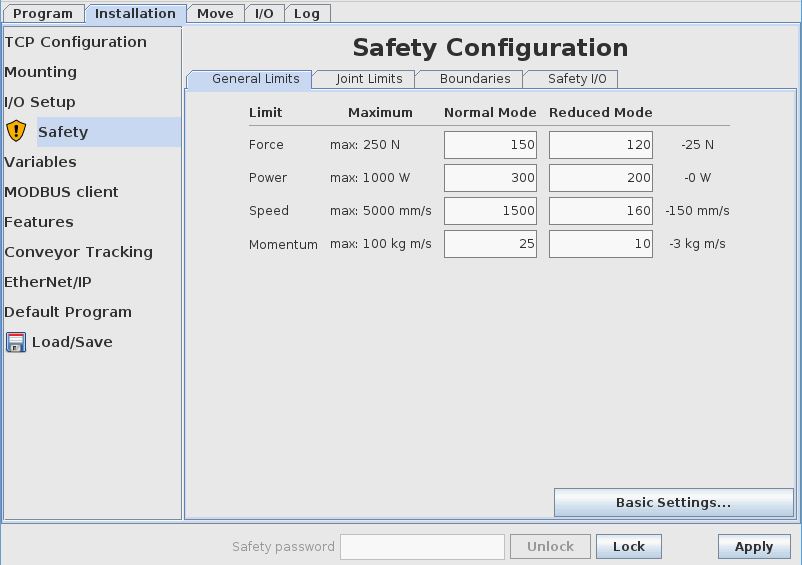
To set the desired speed in the area between the planes which is the area with Reduced mode speed – the speed value can be set in the general limits menu. In this example the value of 160 mm/s is selected.
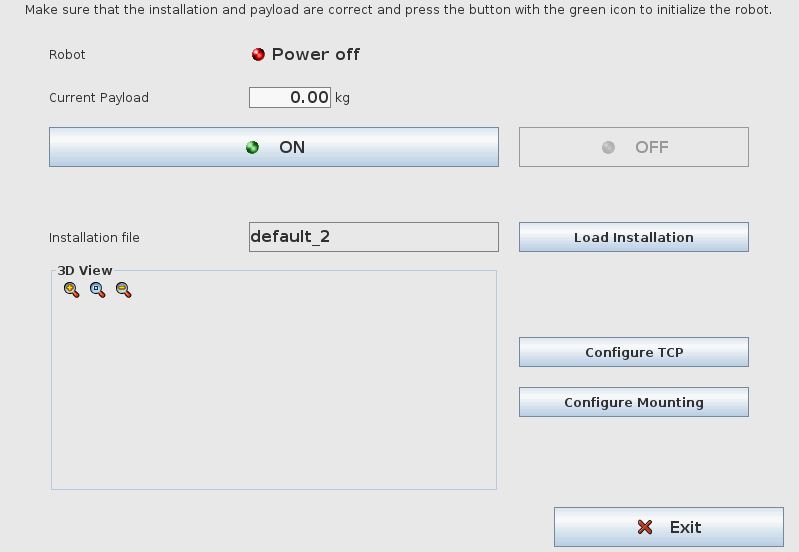
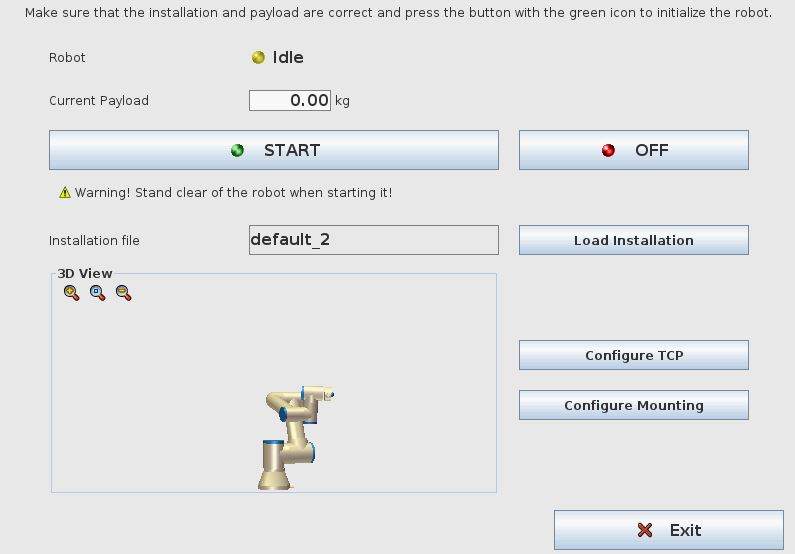
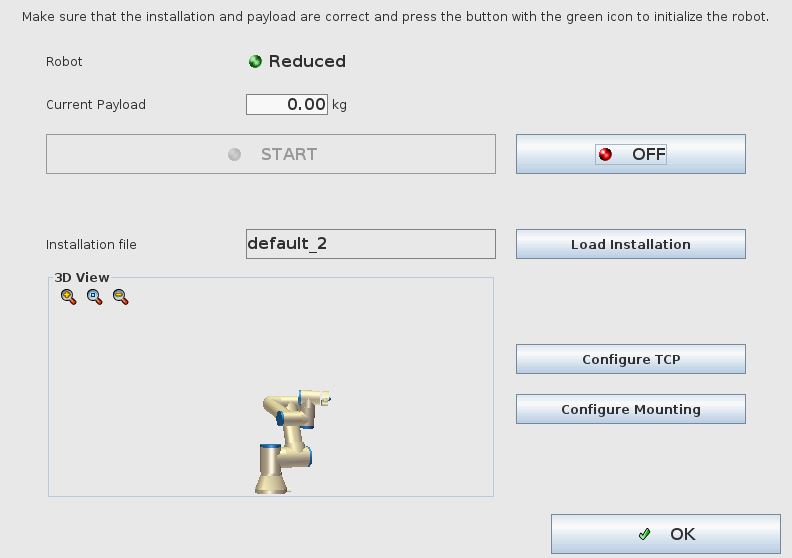
To run the robot the power to the robot must be applied. From the “File” menu the “Initialize screen can be selected.
In the Initialize screen the power can be reapplied with “ON” and “Start” and “OK”.
When the robot is in the area outside both planes – then the robot can run with normal speed.
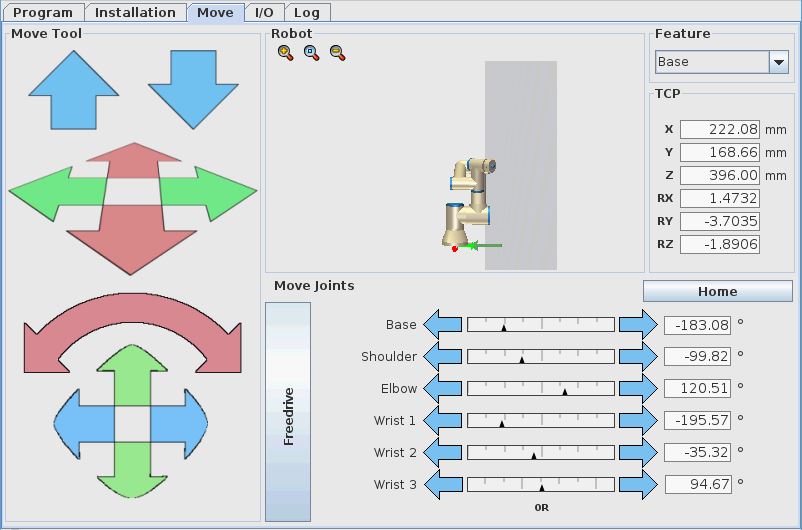
In the area in between the two planes the robot can run with reduced speed.
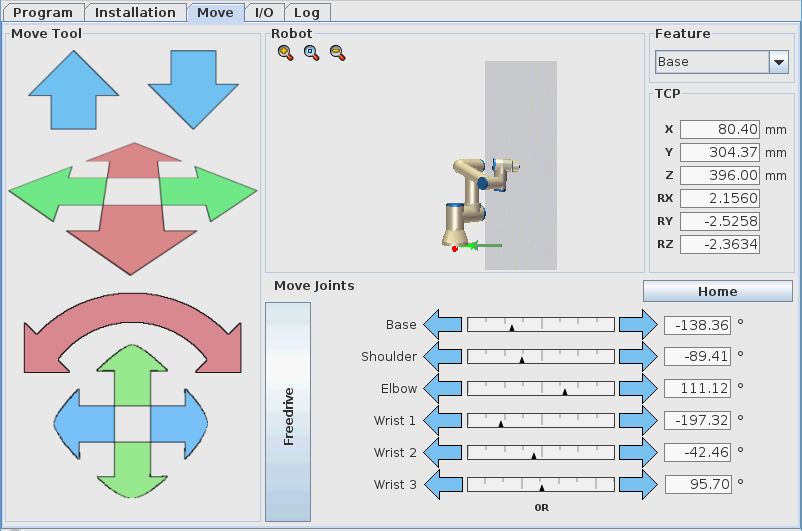
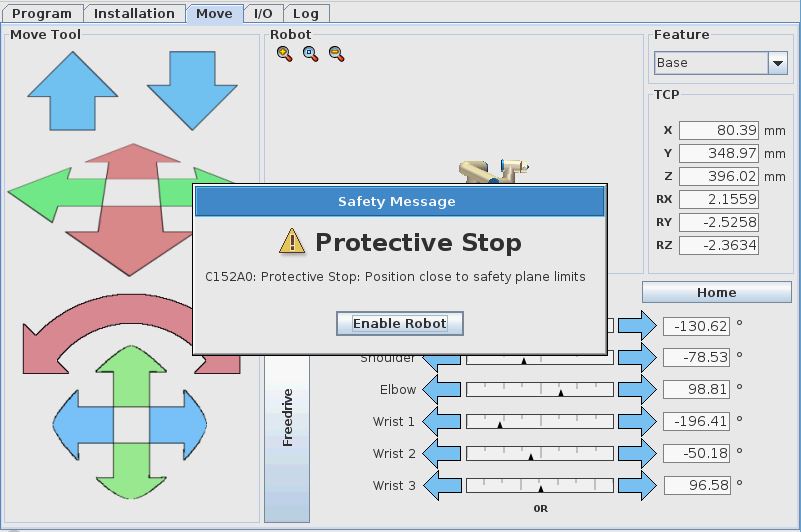
In this example when the robot reach the plane furthest away from the robot – the robot will stop and display a safety stop messages.
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.