Pick and place application using pneumatic gripper:

This Example is a simple pick and place program using a pneumatic gripper. The parts used and files to download are below on this page.
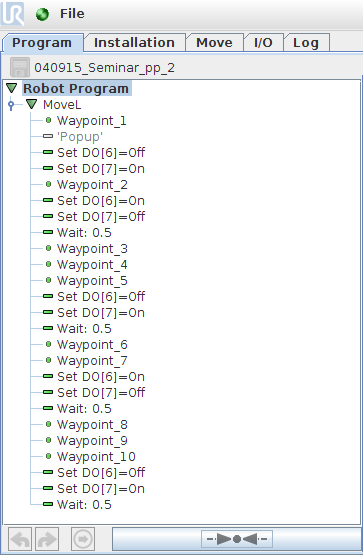
The valve used has two relays – one for opening the gripper and one for closing the gripper. The valve relays are connected to output 6 and 7 on the robot and the pneumatic tube are connected to the pneumatic chuck.
In this case the connection is made so if output 6 is OFF and output 7 is ON then the gripper is open. If output 6 is ON and Out put 7 is OFF then the gripper is closed. (If both outputs 6 and 7 are set to the same value then the open and close state is undefined).
A program with Waypoints are created so the gripper is being opened in the beginning of the program. Then the robot moves down to an object and close the gripper and thereby hold the part. Then the robot moves up and over to a new location and opens the gripper and thereby release the part and the robot moves up.
In this case the robot goes down and pick the part again and move it back to the original position of the part.
And then the program runs again the same cycle.
Notice the Wait statements when opening and closing the gripper in order to give the pneumatic mechanics time to also open and close the gripper – otherwise the part might be not fully held or released when the robot starts to move – therefore the Wait statements.
The Program:
For this application is used these components:
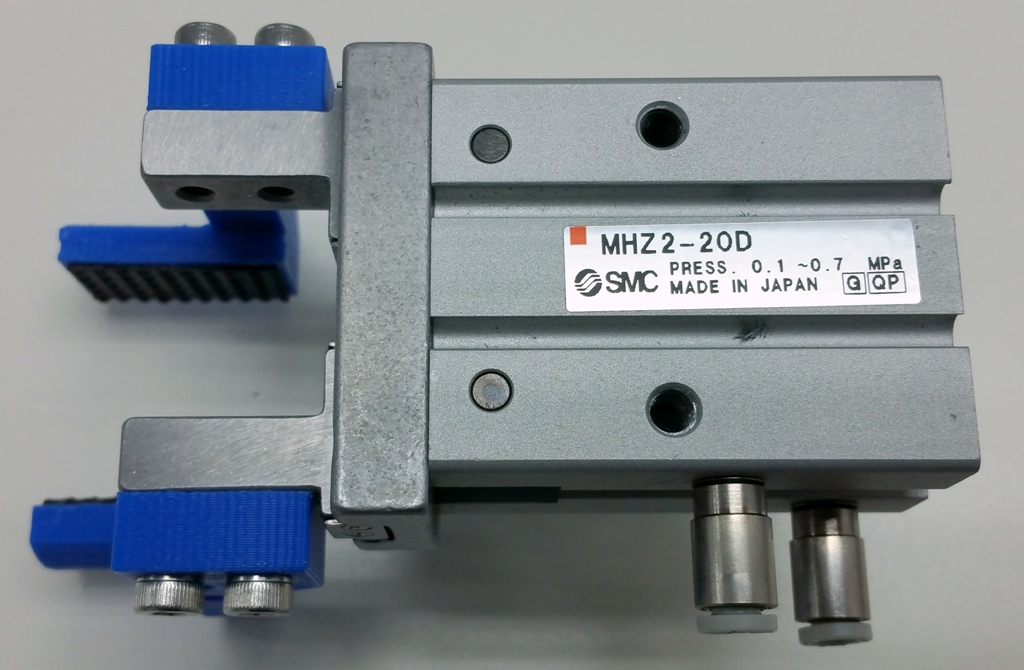
SMC chuck with fingers.

SMC Valve.

Compressor to provide compressed air. (You might already have compressed air in your facility).
To purchase parts from our go to our Go to Zacobria Webshop
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.